
近些年來,汽車的智能駕駛成為了各家車企跑馬圈地的新戰(zhàn)場,特別是對于新能源車企而言,智駕更是兵家必爭之地。在當前的國內智駕領域,華為系和小鵬可以說位于國內第一梯隊,而近期,同為新勢力的極氪]也開啟了城市無圖NZP的萬人公測活動,而小編非常榮幸也受邀進行了體驗。

在試駕體驗開始前,極氪方面先介紹了一下極氪的浩瀚智駕2.0以及基于該系統(tǒng)推出的無圖城市NZP。極氪方面表示,基于端到端大模型的架構能力,極氪無圖城市NZP實現“公測即全國、有路就能開”。
據了解,極氪浩瀚智駕2.0包含了場景認知大模型SCM和交互式規(guī)控大模型IPM兩種大模型分析。前者基于對靜態(tài)和動態(tài)目標及彼此關系的深度理解,能夠實現從“感知”路況到“認知”路況的全新升級。認知準確度能夠提升超過120%。而后者通過分析人類駕駛員短期應變的方式,融合了預測、決策和規(guī)劃能力,最大限度還原了人類駕駛員的駕駛方式,大幅提升系統(tǒng)的交互博弈和路徑規(guī)劃能力。
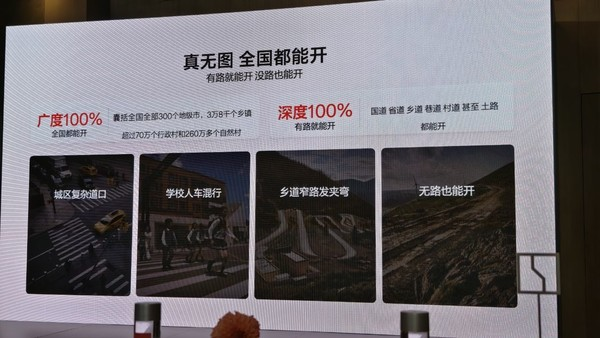
極氪表示,在上述兩種大模型的加持下,極氪無圖城市NZP的場景使用上限得到大幅提升,覆蓋全國100%城市,包括3萬+鄉(xiāng)鎮(zhèn)和300萬+鄉(xiāng)村,在省道、鄉(xiāng)道、巷道、村道,甚至無車道線的土道都能暢行無阻。
當然,光說不練假把式,實際表現究竟如何,只要親自體驗過才知道。說走咱就走,在參加完介紹會后,我們來到了一臺已經開通了無圖NZP功能的極氪007上,準備實際感受一下極氪的無圖城市智駕的最終表現。

既然是試駕體驗,極氪方面也早已預先安排了兩條試駕線路。線路一主要在酒店周邊的進行,體驗無保護左轉、超寬車道、類環(huán)島道路等情景。需要注意的是,目前城市無圖NZP還無法在酒店內道路行駛,因此需要將車輛開出酒店,來到公共道路才能開啟。

在設置好線路導航,并將車輛開出酒店后,隨著一聲“NZP功能已激活”的提示音,車輛正式開啟了智駕模式。功能剛開啟時,我的腳還是一直放在剎車上方,做好隨時接管的準備,畢竟極氪之前的智駕沒少被車主們吐槽。不過在經過了幾分鐘后,我懸著的腳還是放了下來,相比于之前的版本,新版NZP在駕駛體驗上還是要好上不少,整體感受與人類司機頗為類似。
極氪NZP給我的第一印象是將乘客的安全放在第一位,留了較大的安全冗余。一個是車輛會與其他車輛保持一個較寬的車距,在身邊有大車時更是如此。一旦車旁邊有其他大型貨車或渣土車時,車輛會主動開啟大型車輛避讓。同時在前方安全的時候也會選擇加速通過,盡量減少并排時間。車輛在經過斑馬線的時候,也會主動降低車速,如果有行人等待也會選擇禮讓行人,這也符合許多城市目前的禮讓行人交規(guī)。

開啟城區(qū)無圖NZP
在線路一的試駕過程中,除了有一段因為臨時修路導致車道被占用而接管外,全程沒有其他的接管過程。不過在部分路段車輛會突然抽風一下,提示即將接管,不過最后又重新恢復,考慮到目前城區(qū)無圖NZP還處在公測階段,其在穩(wěn)定性方面還有進一步優(yōu)化的空間。
如果說線路一只是城區(qū)無圖NZP的一次小考的話,路程更長更復雜的線路二才稱得上是一次大考。線路二不僅距離更長,而且還會經過蘇州的部分老城區(qū),不光道路相比線路一更窄,而且行人和其他社會車輛也要明顯更多,更加復雜的場景對于車輛智駕的判斷也提出了更高的要求。

復雜場景下NZP表現
在線路二的體驗中,這輛配備了城區(qū)無圖NZP的極氪007的表現依舊非常平穩(wěn),雖然場景相比線路一更加復雜,但是總的體驗和線路一表現也是大差不差,依舊主打一個安全。有行人通過,讓!轉彎有車輛通過,讓!有非機動車經過,也讓!雖然在安全上體驗拉滿,但是在通過效率方面還是有些不足。不過隨車的極氪工程師表示,目前NZP真正開測時間還有限,因此大模型積累的數據還不算吩咐,因此調教上會有些保守。但是大模型能夠不斷的學習,隨著之后數據量的增加,未來該功能會以周為周期進行不斷迭代更新,在體驗上也會更加符合老司機的感受。
除了體驗了城區(qū)無圖NZP外,我們還體驗了極氪的D2D車位到車位領航功能。在開啟該功能后,車輛將支持從一個車位到另一個車位的全程智駕實現。該功能可以分為兩個部分,一個是在地庫或者停車場內部道路行駛,另一個是城區(qū)公共道路的NZP。在地庫等內部道路場景下,車輛可以自動找到出口并自動過閘機,同時還不限車位、支持跨樓層行駛。針對地庫中復雜的停車場景,車輛還能自動識別違停占道車輛并繞行。不過需要注意的是,在首次使用該功能前,車輛需要提前進行學習熟悉。不過一旦學習之后,其表現還是讓我有些驚訝。
自動過閘機
在和極氪方面工程師聊天后,我們還了解到了極氪D2D的一個亮點,那就是這一功能對于兩個地點之間的距離并沒有限制。由于D2D是由內部道路+外部道路兩部分組成,因此只要車輛學習了兩邊內部道路的路段后,中間的部分則全由無圖NZP完成,因此兩地之間距離無論是5km還是50km,都可以實現。這對于一些日常通勤距離較遠的人來說,還是比較方便的。
在此次試駕體驗中,有一個問題引起了我們的注意,那就是當前的版本會隨機出現實線變道的情況,特別是在快要進入紅綠燈路口的時候,兩次實線變線都出現在等待紅綠燈路口的附近。不過隨車的極氪工程師表示,他們已經注意到了這個問題,并且會立刻進行修復,會進一步優(yōu)化車輛在紅綠燈路口選擇車道時的判斷能力。

車輛實線變道
此次一番體驗下來,極氪的城區(qū)無圖NZP功能還是給我留下了較為深刻的印象,相比于之前的極氪智駕,此次的無圖NZP在使用體驗上還是有了不少的提升,基本能夠覆蓋日常駕駛過程中的絕大部分場景。不過可能是因為推出時間還較為有限,在數據的收集和大模型的學習方面還是略有不足。不過相信隨著之后參與測試和使用的車輛數量的增加,該系統(tǒng)在不斷學習后使用體驗也會進一步優(yōu)化,并且還有著很大的潛力待挖掘。
















